realsense d435+d435i
realsense d435+d435i

安装realsense45
环境介绍:
设备 :jetson orin nx
jetpack:5.1.4 2024年12月最新的5系列
建议安装路径为externLib和externROSPackage
在使用我的安装方式之前一定要把系统里通过apt安装的librealsnese和realsense2_ros卸载掉
对应版本在github中的查看,注意选择标签tag去查看,如下图
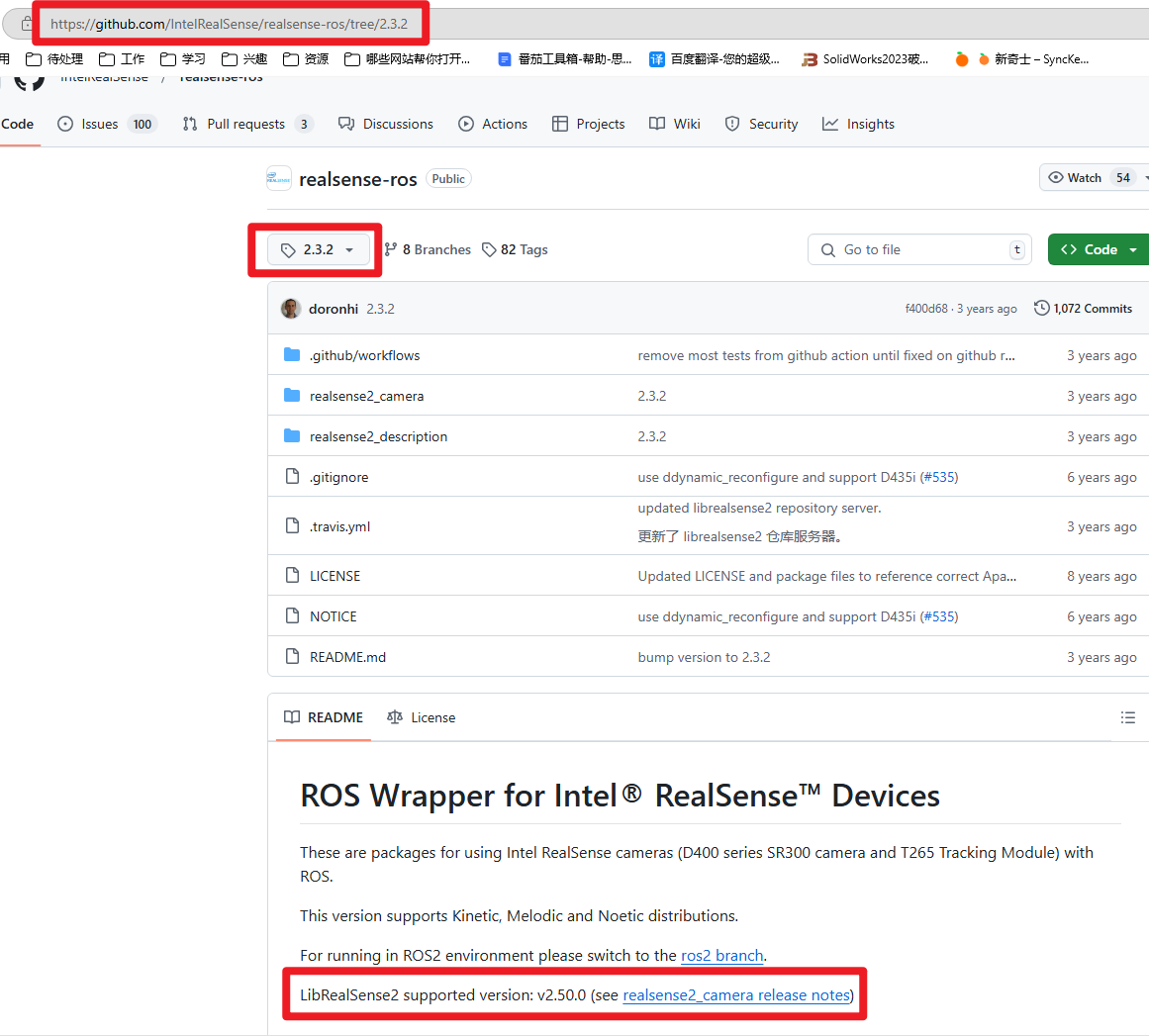
librealsense安装10 11
git clone –depth 1 –branch v2.50.0 https://github.com/IntelRealSense/librealsense.git
librealsense,又名sdk,又名(还有一个名字不记得了也有可能没了)
cd librealsense以后执行
./scripts/setup_udev_rules.sh
sudo udevadm control –reload-rules && sudo udevadm trigger
make build && cd build
以下是cmake参数介绍
| Flags | CPU % |
|---|---|
| apt | 75 |
| RSUSB 0 | CUDA 1 | 75 |
| RSUSB 1 | CUDA 1 | 82 |
| RSUSB 0 | CUDA 0 | 110 |
| RSUSB 1 | CUDA 0 | 113 |
| apt | apt | 106 |
是否使用RSUSB
-DFORCE_RSUSB_BACKEND=true不使用会快一点,但需要内核补全11
./scripts/patch-realsense-ubuntu-L4T.sh
是否调用cuda加速点云的生成
-DBUILD_WITH_CUDA=true
编译需要注意上面两个参数,最后的编译命令为
这里的编译需要保持网络畅通可用连接github
1 | |
realsense-ros安装
git clone -b 2.3.2 https://github.com/IntelRealSense/realsense-ros.git
realsense,又名ROS wrapper,2.3.2是realsense支持ROS1的最后一个版本
进入以后catkin_make 编译即可,网上会有一些教程有参数但是我没加也可以暂时不管
报错第一思考是不是版本不对,下载为ROS2的了,比如报错是catkin_make命令不允许使用等等
显示缺少ddynamic_reconfigure安装即可
Intel RealSense D435i:ROS接口相关配置和启动参数的进一步学习
直接下载
在ros中使用realsense可以直接使用
sudo apt-get install ros-noetic-realsense2_camera ros-noetic-librealsense去安装
这部分教程可以查看3 类似的
为什么使用自己编译的,使用官方库,点云的数据传输有问题
- 数据如果使用彩色点云,帧率不高一般在6帧或者3帧
- 或有类似uvc streamer watchdog triggered on endpoint的报错导致RGB不可用
虽然通过参数的调整,问题二可以解决,但问题一帧数不满足,于是决定自主构建
最后完美解决
ROS中调用
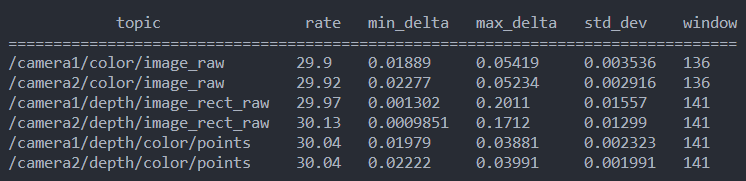
rs-enumerate-devices查看支持的帧率
使用PCL安装
D435i坐标系定义

具体来说,RealSense相机坐标系包括以下三个轴:
×轴:水平方向,从左到右;
y轴:垂直方向,从下到上;
z 轴:从相机到被拍摄物体的深度方向,从近到远。